ガラスの触り心地の制御と評価
Control and Evaluation of Glass Tactile-feeling
稲本美砂*・西田航*・岡畑直樹*
Misa Inamoto, Wataru Nishida, Naoki Okahata
*旭硝子株式会社 商品開発研究所
ガラス表面に目に見えない微細な形状を付与することで、外観をそのままにガラスの触り心地を制御することができる。アンケートなどの感覚的な手法に加え、定量的な評価手法について検討を行った。本研究では触り心地の主因子が指滑り性であるとの仮説に基づき、実際にガラスに触れた際の動摩擦係数(実指μ)を測定することで、触り心地の定量的評価に成功した。さらにガラスの形状と指滑り性の間に相関があることを見出した。
By imparting visually imperceptible structure to the glass surface, it is possible to control the touch feeling of the glass while keeping its exterior appearance. In addition to sensory methods such as questionnaires, quantitative evaluation methods were examined. In the present study, based on the hypothesis that the main factor of touch feeling is finger slipperiness, we succeeded in quantitative evaluation by measuring the dynamic friction coefficient when actually touching the glass. Furthermore, we found that there is a correlation between surface texture and finger slipperiness.
1. 緒言
ものの触り心地(触感)は、凹凸感、摩擦感、柔硬感、温冷感など様々な皮膚感覚から得られる感性の総称を指す。これまでガラスの評価は強度や耐久性、光学特性が中心で、触感や質感といった感性の分野にはあまり踏み込まれていなかった。しかし近年、ガラスの用途が多様化する中で触感評価の必要性が高まっている(1)。
本稿第2章ではガラスの触り心地の定量評価手法の検討について述べる。実際に指で触った時の感性と相関のある形で指滑り性を数値化した。さらに、指滑り性の人や環境依存性について考察するため、指の皮膚の特性評価を実施した。
第3章ではHertz接触理論に基づくガラスの指滑り性のモデル化検討について述べる。Hertz接触理論を用い、ガラス表面の微細凹凸と指滑り性の関係を考察した。
2. ガラスの触り心地の定量評価
2.1. 触感制御ガラス開発の背景
近年ガラスの用途は多様化し、建物や自動車の窓のみならず、スマートフォンやタブレット等タッチ入力デバイスのカバーとしても多く使用されている。インターフェースとしてのガラスの利用が広がる中、ガラスに触れる機会が増えたことでガラスの触り心地が重要視され、様々な触感を有するガラスが求められている。
一般的なガラスの触感を変える技術としては、アンチグレア加工が挙げられる。この加工を施したアンチグレアガラス(AGガラス)は表面にミクロンオーダーサイズの構造を有するため、その外観は光を散乱し白く曇ったように見える。防眩性能が求められる用途で重宝される一方、ガラスが本来持っている透明感や質感は失われてしまう。
本稿で紹介するガラスは、外観を変えずに触感を変えられることが特徴である。具体的には、ガラス表面に目に見えないサイズの凹凸と透明なコーティング(Anti-Fingerprint; AFP)を施すことで、様々な触感を実現することが可能になる。
一般的なガラス(未処理品)と本開発品(ナノ構造ガラス)、AGガラスの写真をFig.1に示す。本開発品は一般的なガラスと同様に透明感や光沢感を持つのに対し、AGガラスではそれらが失われ全体的に光を散乱しているのがわかる。
 Fig.1 Appearance of various types of glass.
Fig.1 Appearance of various types of glass.2.2. 本研究の背景と目的
触感を制御したガラスの開発にあたっては触感を評価する手法が必須となる。これまでは触感の定量評価について知見がなく、官能評価に頼らざるを得ない状況であった。例えばガラス表面の凹凸形状が触感に与える影響を調べるために、官能評価によるマッピングや100人を越える人へアンケートを行ってきた。
ただし、官能評価では細かい評価や比較、議論ができないという課題があり、開発を進めていくうえで数値的な指標が必要とされた。調査を進めていくと、触感は滑る/ひっかかる、さらさら/ざらざら、凸凹/平坦、柔/硬、乾/湿、温/冷、嗜好性など非常に多くの要素からなり、定量化が非常に困難であることがわかった。現在でも確立された評価指標がなく、アカデミックレベルでも様々な議論がある(2)。
本開発では素材は全てガラスで統一されているため、柔/硬、乾/湿、温/冷といった要素が大きく変わることはない。また表面の凹凸構造も非常に小さく、触った際にざらざら感や凹凸感はほぼ感じられない。すなわち、触感の中で滑り性が最も支配的な要素となっており、触感≒指滑り性と単純化して捉えることができると考えた。
本研究では指で触った際の触感に特化し、指滑り性を数値化することを目的とした。
2.3. 指滑り性の数値化
2.3.1 指滑り性の数値化手法検討
まずは様々な材質の端子でガラスを擦り、動摩擦係数(μ)を測定した。μは摩擦抵抗力(進行方向と逆向きにかかる力)を垂直抗力で割ることにより算出される。樹脂、布、金属、カーボン等、接触端子の材質の違いにより、同じガラスを評価してもμ値が異なることがわかった。次に異なる表面形状を持つガラスを準備して同様の測定を行ったところ、端子の材質によってμの順列が変わることが明らかになった。しかし実際に人が指で触った時の感覚と相関する端子を見つけることはできなかった。
人間が触覚を感じるにあたっては指紋が重要な役割を果たしていることがわかっている(3)。そこで素材のみならず端子の形状に着目し、疑似指紋構造が付与されたトリニティーラボ社製の触覚接触子(4)(疑似指;Artificial finger)を用いて測定を実施した。測定にあたってはナノ構造ガラスを3種類、リファレンスとしてAGガラスを3種類用いた。結果をFig.2に示す。
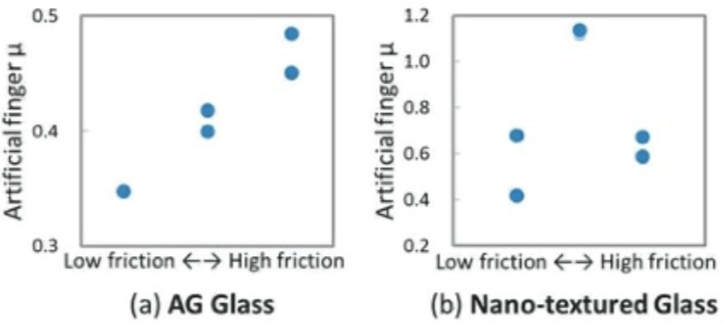 Fig.2 Correlation between artificial finger μ and sensory evaluation.
Fig.2 Correlation between artificial finger μ and sensory evaluation.横軸は10名にアンケートをとった結果に基づく官能評価での指滑りの順列、縦軸は疑似指の動摩擦係数(疑似指μ)を示す。AGガラスでは疑似指μが人の感覚と相関する結果となった。一方でナノ構造ガラスでは、実際に触れた場合の指滑り性が明確に異なるサンプルであっても、疑似指μに差が見られなかった。これはナノ構造ガラスの凹凸サイズがAGガラスのそれと比較して遥かに小さく、構造が指滑り性に与えるメカニズムが異なるためと考えている。ナノ構造ガラスの表面形状の一例をFig.3に示す。
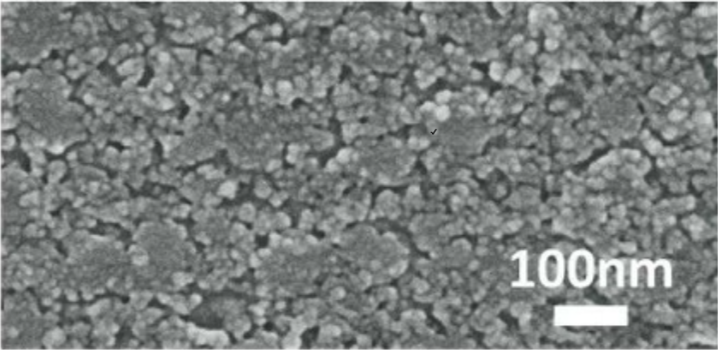 Fig.3 Surface texture of Nano-textured glass.
Fig.3 Surface texture of Nano-textured glass.摩擦は二物体間の現象であるため実際の指で測らないと正しく評価ができない可能性が高いと考え、そのような測定が可能な装置を探した。
シャンプーやリンスの開発における髪の指通り性評価について、Heidon社製の触感計TYPE:33を用いた研究事例があり、人の指で評価した動摩擦係数と髪の指通り性に相関があると報告がされている(5)。この触感計は歪ゲージを用いて押し付け方向と掃引方向にかかる力の関係から動摩擦係数を算出するもので、ファンデーションやクリームの塗り心地の評価に使われている。この装置でガラスの指滑り性評価を試みた。
被験者にスマートフォンやタブレットを操作するイメージで一方向(右利きの場合は左から右)に利き手人差し指で数回ガラスを触ってもらい、その際のμ(実指μ)を測定した。3種類のナノ構造ガラスの評価結果をFig.4に示す。比較のため前述の疑似指μも測定した。
疑似指(Fig.4-a)ではサンプル間で明確な差が見られなかったのに対し、実指(Fig.4-b)では実際に触った時の滑る/ひっかかるという感覚と同じ傾向を示した。すなわち、実指μにより指滑り性を実際の感性と相関のある形で数値化できたと言える。
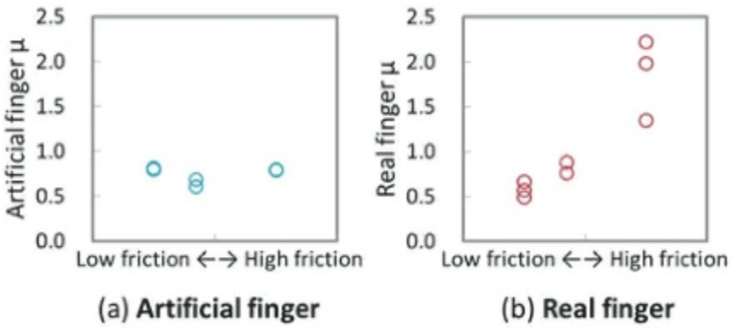 Fig.4 Measured μ in Nano-textured glass.
Fig.4 Measured μ in Nano-textured glass.2.3.2 ガラスの表面形状と指滑り性の関係評価
指滑り性を定量化したことで、ガラスの表面粗さ(Ra)などの形状パラメーターと指滑り性の関係の解析が可能となった。
一般的なガラス(Ra ≒ 0 nm)とRaの異なるナノ構造ガラスの実指μを被験者4人で評価した結果をFig.5に示す。尚、評価に使用したガラスにはすべてAFPが成膜されている。
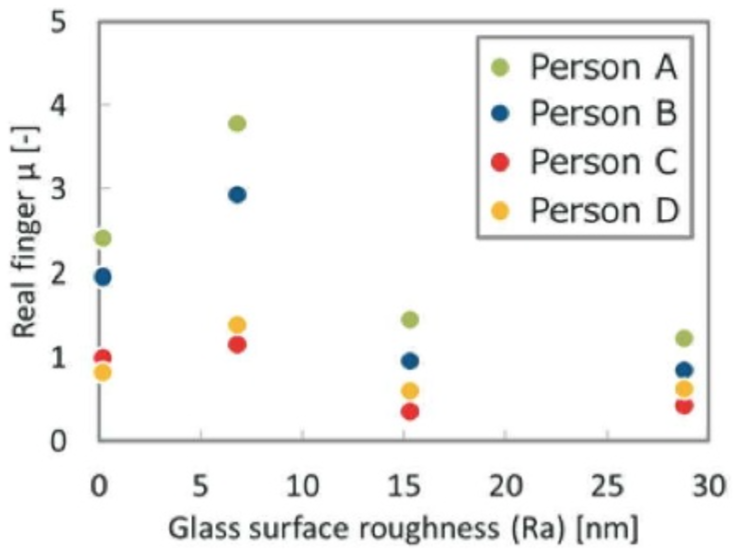 Fig.5 Relation between Ra and real finger μ.
Fig.5 Relation between Ra and real finger μ.ガラス表面をわずかに粗化する(Ra: 数nm)と実指μが大きくなって強い引っ掛かりを感じるが、Raが大きくなるにつれて一転して実指μが小さくなり、滑るように感じる。さらにあるRa以上では滑り性はほぼ一定になるという現象が見られる。触る人によってμ値に個人差はあるものの、この傾向は変わらない。これは数値化に取り組む前から経験的に認識していたことだが、今回の取り組みにより初めて官能的な感覚を数値化することに成功した。
またRa以外にも様々なガラスの表面形状パラメーターと、官能的な指滑り性の相関を評価した。例えば、粒子数(凸粒子数)は経験上指滑り性との相関が強い。これを数値に落とし込むことができれば、より具体的な形状へのフィードバックが可能になる。
粒子数の定義はある高さ以上の凸の数とした。具体的には原子間力顕微鏡(Atomic Force Microscope; AFM)(SII社製SPI3800)で測定した8μm□の形状データから算出した。頂点頻度が最も高い面を基準平面、最大高さを通る面を+100%とした時に、+20%の高さの断面における円の数を粒子数としてカウントした。簡易的に2次元波形での例をFig.6に示す。この場合、粒子数は4となる。
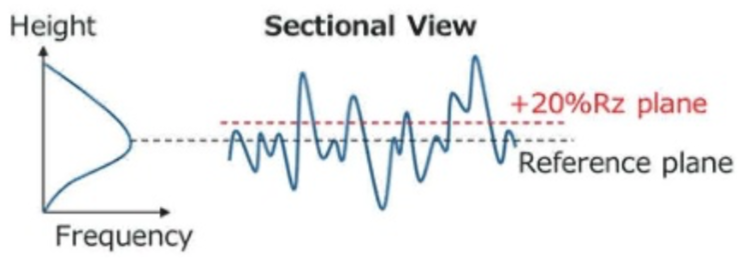 Fig.6 2-D example of the calculation.
Fig.6 2-D example of the calculation.2人の被験者にて、14種類の表面形状を有するナノ構造ガラスの粒子数と実指μを評価した結果を Fig.7に示す。
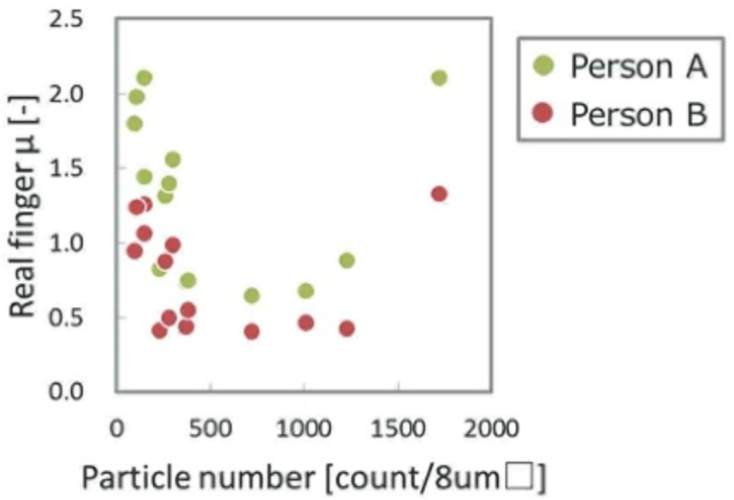 Fig.7 Relation between particle number and real finger μ.
Fig.7 Relation between particle number and real finger μ.個人差はあるが、両被験者共に粒子数が500~1000個の範囲で実指μは極小値をとることがわかった。なおこの結果はAFPの有無によらず同じ傾向である。
このように、指滑り性を数値化できるようになったことで、形状パラメーターとの相関を可視化できるようになった。
2.3.3 実指μの人依存性
Fig.5やFig.7に示されるように、実指μの絶対値は被験者(触る人)に依存することが明らかとなった。ただし、サンプル間の大小は人によらず同じである。被験者4人で2種類のガラス(一般的なガラス/AFP、指滑り性の良いナノ構造ガラス/AFP)の実指μを評価した結果をFig.8に示す。
各被験者ともサンプル間の順列は同じであるが、詳細は異なる。Aさんは2つのサンプル共にμ値が大きくサンプル間の差も大きいのに対し、Cさん、Dさんは値も差も小さい。ここで興味深い結果が得られた。μ値の数値的な差が小さいCさん/Dさんも、Aさん/Bさん同様にサンプル間の指滑り性の差を明確に感じており、数値と感覚の相関があったのである。
さらに評価を進めると、同じ人であっても触るタイミング(日や時間)や環境によって実指μ値が異なることがわかってきた。
つまり実指μはあくまで相対値として取り扱わなくてはならず、サンプル間の比較をするにあたっては同一のタイミング・環境で同一人物が評価した実指μを使用する必要がある。
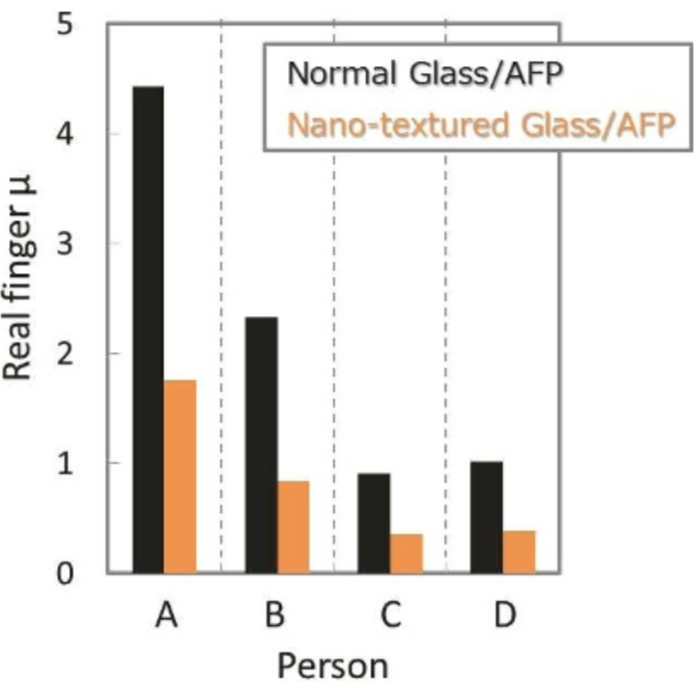 Fig.8 Real finger μ by persons.
Fig.8 Real finger μ by persons.2.4. 指滑り性と皮膚特性の関係
実指μが人に依存する要因としては皮膚構造と皮膚特性が考えられる。具体的に構造は指紋形状など、皮膚特性は潤いや柔らかさなどが挙げられる。皮膚特性は寝不足の日や冬場は乾燥しやすい等、測定のタイミングや環境によって変化する可能性がある一方で、指紋形状が変化するとは考え難い。そこで指の皮膚特性が実指μの支配因子になっていると予測して検討を行った。
評価にあたっては顔だけでなく全身の様々な部位において評価実績のあるCourage+Khazaka社製のCutometerを用いた。この装置は主に医療関係の研究開発や臨床で使用されており、例えばアトピー患者の治療における経過観察や、食品成分の肌への効果検証に使用されている(6)。評価できる項目は、水分量、水分蒸散量(保湿力)、押込み柔らかさ、吸引柔らかさ、皮膚の回転摩擦(皮膚摩擦)、油分量である。予察の結果、油分量は指ではうまく検出されないことがわかり、今回は評価項目から外した。評価箇所はタブレットなどに触れることを想定して、利き手人差し指とした。評価項目とその詳細を下記に示す。
・水分量[-] (Moisture):静電容量法で皮膚表面15μm(角質層)の水分を計測する。
・水分蒸散量[g/h/m2] (Water evaporation):2組の温度・湿度センサーを通過する水分の差を計測する。
・押込み柔らかさ[mm] (Indent softness):プローブの稼働端子の長さで皮膚の硬度を計測する。
・吸引柔らかさ[-] (Suction softness):皮膚を吸引・開放した際の皮膚の変異から粘弾性をモニターし、総吸引量から皮膚表皮の柔らかさを計測する。
・皮膚摩擦[-] (Rotational friction):回転するテフロン板を一定加重で押し付け動摩擦を計測する。
被験者3人に協力いただき、2日間にわたって皮膚特性と実指μを測定した。皮膚特性の結果をFig.9に示す。測定にあたっては3種類のナノ構造ガラスを用いた。
測定日によって数値が異なるが、ここでは人による違いに注目して議論する。Aさんの指は水分量が多く柔らかいという特徴がある。Cさんの指は比較的水分量が少なく硬い。Bさんは3人の中では中間の位置づけである。
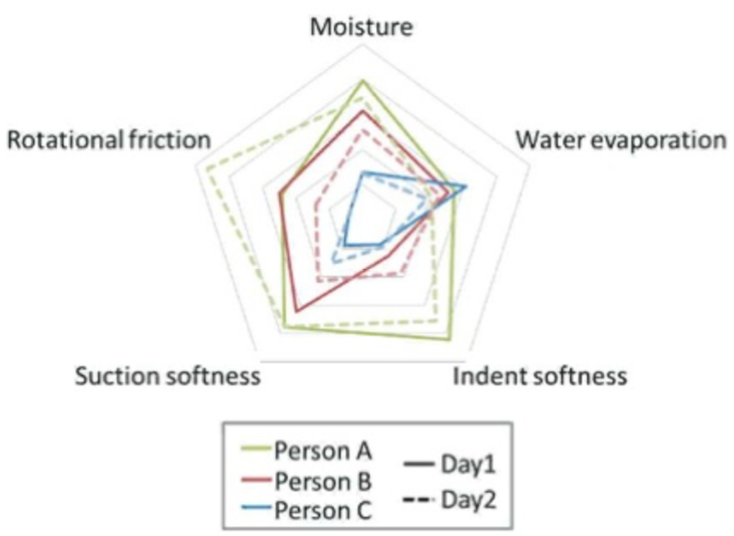 Fig.9 Personal and test-day dependence of skin parameter.
Fig.9 Personal and test-day dependence of skin parameter.実指μと皮膚特性の関係をFig.10に示す。押込み柔らかさ(b)と皮膚摩擦(d)には実指μとの顕著な相関がみられなかったのに対して、吸引柔らかさ(a)と水分量(c)は実指μと相関があることがわかった。さらに水分量と吸引柔らかさにも関係があり、水分が多い方が柔らかい傾向にある。
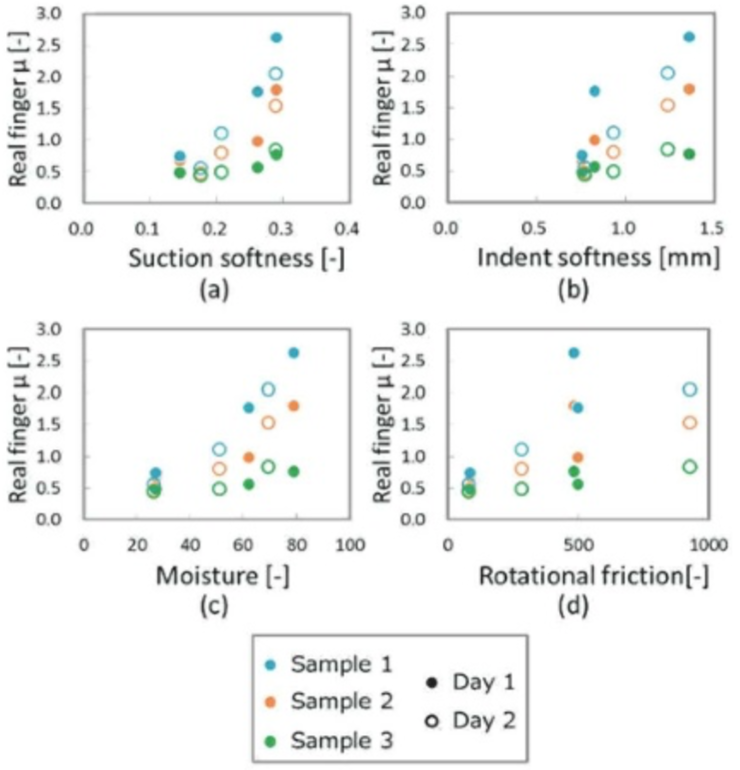 Fig.10 Relation between real finger μ and each skin parameter.
Fig.10 Relation between real finger μ and each skin parameter.2.5. 考察
2.3.2で指滑り性はガラスの表面形状によって影響を受け、適度な粒子数にて実指μが極小となることを示した。Fig.11にガラス表面と指の接触についての模式図を示す。指とガラスの接触面積は粒子数が少なすぎても多すぎても大きくなり、適度な粒子数において接触面積が極小となり、実指μが小さくなると考えられる。
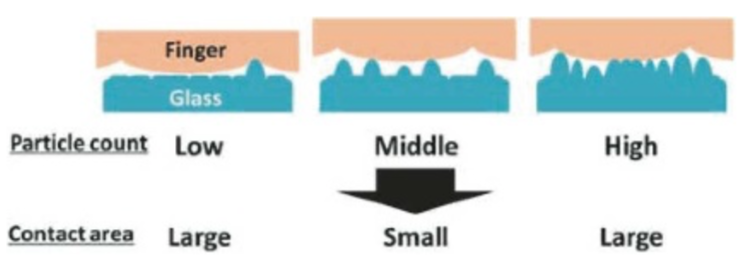 Fig.11 Contact image between finger and nano-structured glass.
Fig.11 Contact image between finger and nano-structured glass.ここまでは皮膚特性絞って議論を進めてきたが、次に、皮膚構造に注目することにする。一般的には指紋の凹凸ピッチが0.4mm程度(3)であるのに対し、ナノ構造ガラスの表面構造サイズは、その名の通り数nmから数十nmと、大きくオーダーが異なる。通常はこれだけサイズの大きく異なる者同士が干渉しあい、指滑り性に影響を与えるとは考え難い。しかし実際に数µm角の範囲で評価したRaや粒子数などの表面形状パラメーターは、実指μの値と良い相関を示す。また指紋サイズに合わせて、レーザー顕微鏡等により評価範囲を100μmからmm単位まで拡げても実指μとは相関がなく、ガラスのうねりのようなものが触感に影響している可能性は低い。
そこでガラス表面の凹凸に対応する細かな形状が指にも存在するとの仮説を立て、指の皮膚の形状について評価を実施した。人差し指の中央上側にある指紋構造の凸部分(実際にガラスに触れる箇所)の表皮を光学顕微鏡及び電子顕微鏡(Scanning Electron Microscope; SEM)で観察した結果をFig.12に示す。
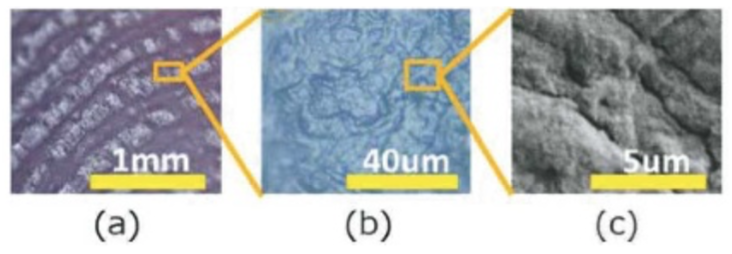 Fig.12 Surface structure of skin on a finger. (a)(b) Optical microscope image. (c) SEM image.
Fig.12 Surface structure of skin on a finger. (a)(b) Optical microscope image. (c) SEM image.皮膚表面には指紋よりはるかに小さい、サブミクロンオーダーの非常に細かい構造があることが明らかとなった。この結果からガラス表面の目に見えないナノオーダーの構造で触感を制御できるのは、人の指の皮膚が、同じオーダーの非常に細かい構造を有しているためと考えられる。
次に指の皮膚の柔らかさが指滑り性に与える影響について考える。2.4で示したように皮膚が柔らかい人の実指μは大きく(ひっかかりやすく)、硬い人は小さい(滑りやすい)。Fig.13に硬い指と柔らかい指で触った際の実指μの測定プロファイルを示す。典型的に指質が異なる方にご協力いただいた。
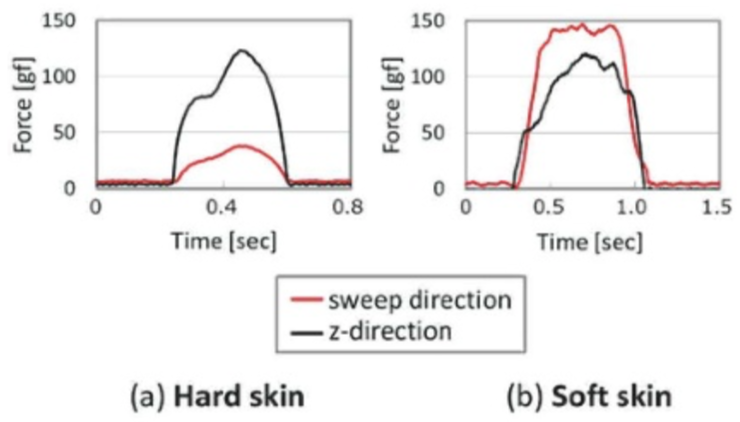 Fig.13 Measurement profile of real finger μ.
Fig.13 Measurement profile of real finger μ.指の押込み方向(z-direction)にかかる力は両者とも100gfとほぼ同等であるのに対し、掃引方向(指を滑らせる方向; sweep direction)にかかる力は柔らかい指の方が極端に大きい。ガラスと指の接触面の模式図をFig.14に示す。
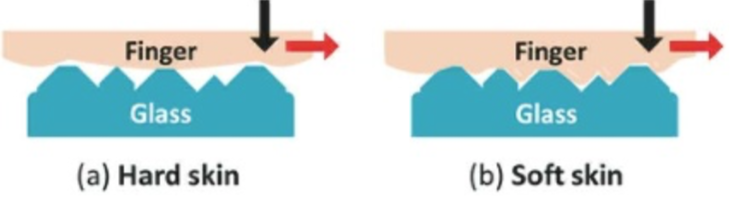 Fig.14 Contact surface image between finger and glass.
Fig.14 Contact surface image between finger and glass.皮膚が硬い場合、指はガラスと接触しても変形しないため接触面積は小さくなる。一方で、皮膚が柔らかい場合は、ガラスの形状に追従して指が変形し接触面積が大きくなる。この接触面積の差が実指μの違いとなって現れると考えられる。
今回の測定法では同じ柔らかさでも、吸引と押込みの2種類の柔らかさについて評価できる。前者は実指μと良い相関を示すが、後者は目立った関係が見られない。同じ柔らかさを測るパラメーターであるにも関わらず評価結果に差があるのは、測定深さが影響していると考えられる。吸引柔らかさは皮膚のごく表皮を掃除機の要領で吸い込んで測定するのに対し、押込み柔らかさは3mm程度と非常に深い領域まで反映される。指の柔らかさは骨や血管などの影響により評価深さによって得られるデータが異なることが知られている(7)(8)。今回の結果から対象物と接触している極表層、すなわち皮膚表皮の柔らかさが指滑り性の支配因子であることが示唆される。
皮膚摩擦(Fig.10-d)と実指μに顕著な相関が見られなかった理由については、実際に接触している対象物の材質が異なる(ガラスではなくテフロン板である)こと、摩擦には水分量/柔らかさだけでなく、油分量も影響するためと考えている。
2.6. まとめ
今回の検討から、触感を実指μというひとつの物理量として定量評価できるようになった。
実指μは相対的なパラメーターであり、複数サンプル間の順列は人が違ってもほぼ同じになるが、絶対値は人や測定環境に大きく依存することが明らかになった。これについては指の表皮水分量/柔らかさが主要因となっている可能性が高い。実指μと皮膚特性を組み合わせて評価することで、触感の理解がより深まると考えている。
実指μでの指滑り性の数値化に成功したことで、表面形状パラメーターと触感についての解析や考察が可能となった。第3章では実指μ値を用い、さらなる形状と指滑り性の相関理解のため、Hertz接触モデルを用いた指滑り性値の算出を検討する。
3. 指滑り性制御のためのモデル化
3.1. モデル化の背景
第2章の検討から指-ガラス表面間において実指μが表面形状の依存性を持つことが明らかになった。表面粗さや粒子数が重要な因子であることが示唆されているが、そのメカニズム解明には至っておらず工業製品として機能制御する際には必ず明らかにしなければならない知見である。そこで指とガラスの接触状態を考慮したHertz接触モデル(9)を構築して定性的な滑り性のモデル化の検討をおこなった。
3.2 Hertz接触理論に基づく凹凸表面形状と指滑り性の関係について
Hertz接触理論ではFig.15に示すように二つの球(半径R1,R2 ヤング率E1,E2 ポアソン比ν1,ν2)が接触しているとき、接触面半径a、球間に働く法線方向力Fg、球の接近変位δが与えられ、接触理論の基礎となっている。
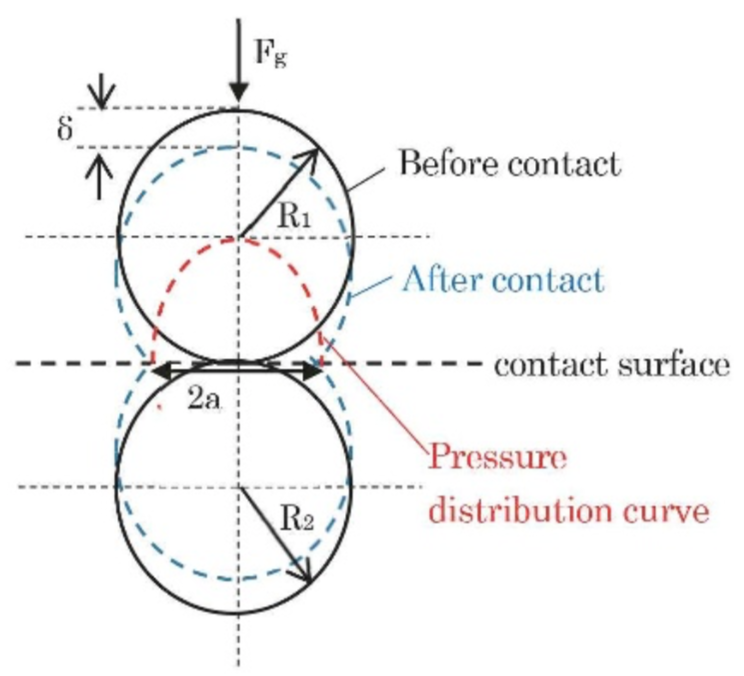 Fig.15 Schematic of Hertz contact model by ball vs ball.
Fig.15 Schematic of Hertz contact model by ball vs ball.ここで微視的視点から指紋と凹凸ガラス表面との接触を考える。Hertz接触理論は2曲面の静的接触における応力であって、本論のように法線力と接線力が同時に作用する系では適用できないが、R.D.Mindlinは法線力と接線力を考慮した内部応力分布を解析している(10)。Fig.16に示すような球と球の接触に置き換えることで法線方向力、摩擦係数μと接触面での滑り現象が発生した時の相対変位量を求めることができる。接触面は半径aの円形であり式(1)と式(2)を用いて式(3)で表すことができる。更に接線方向力Fhが加わると式(4)で表される相対変位δhが発生する。(11)(12)
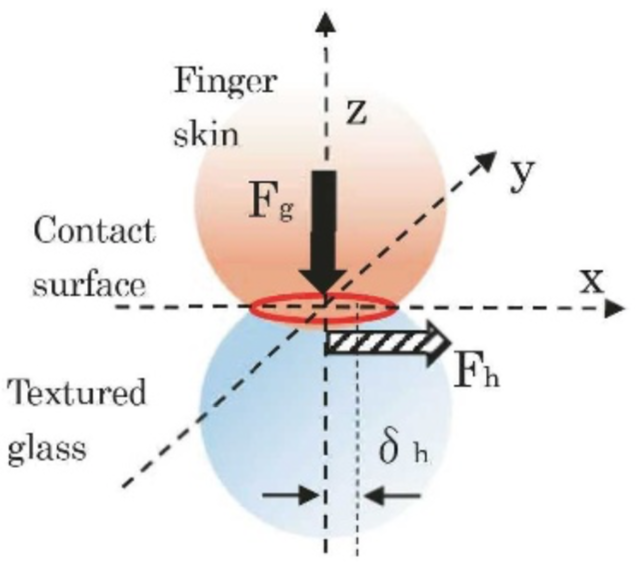 Fig.16 Deformation of finger skin during the textured glass contact.
Fig.16 Deformation of finger skin during the textured glass contact.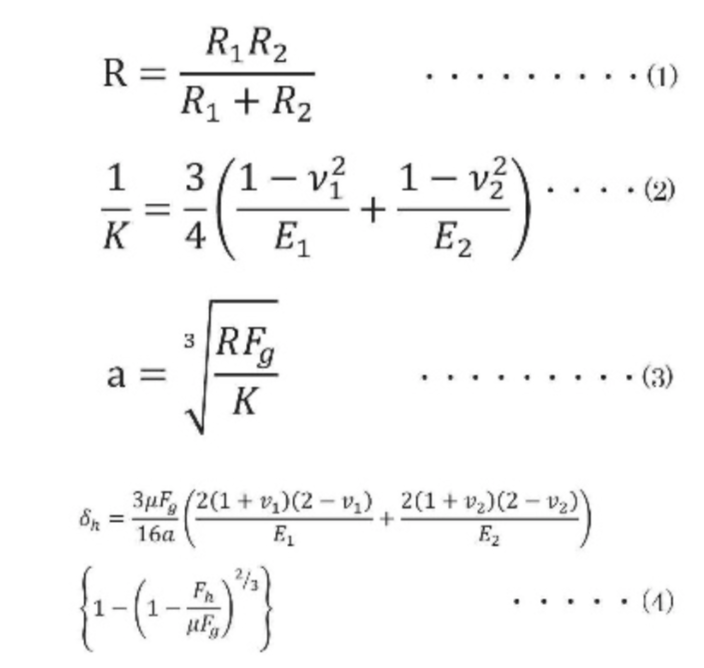
3.3. 観測データのHertz接触モデルへの適用
3.3.1 ガラス試料と指の表面形状、物性データ取得
ガラス表面形状の違いによる指滑り性の定量化を実施するにあたり、ナノ構造ガラス、及び指の形状と機械特性の数値取得を行った。ガラス表面形状の評価はAFMで実施した。表面形状が異なるa~dの4種類のナノ構造ガラスを準備し最大高さ粗さ(Rz)を取得した。試料の凹凸形状は球形と仮定し半径(R1)はRzの1/2と定義した。機械特性のヤング率(E1)、ポアソン比(ν1)は弊社内での測定データを用いた。一方、指紋の機械特性(ヤング率(E2)、ポアソン比(ν2)については文献値(8)(13)を用いた。指紋形状は球形と仮定し半径(R2)を50μmとした。Table 1にガラス試料、Table 2に指の物性データを示す。
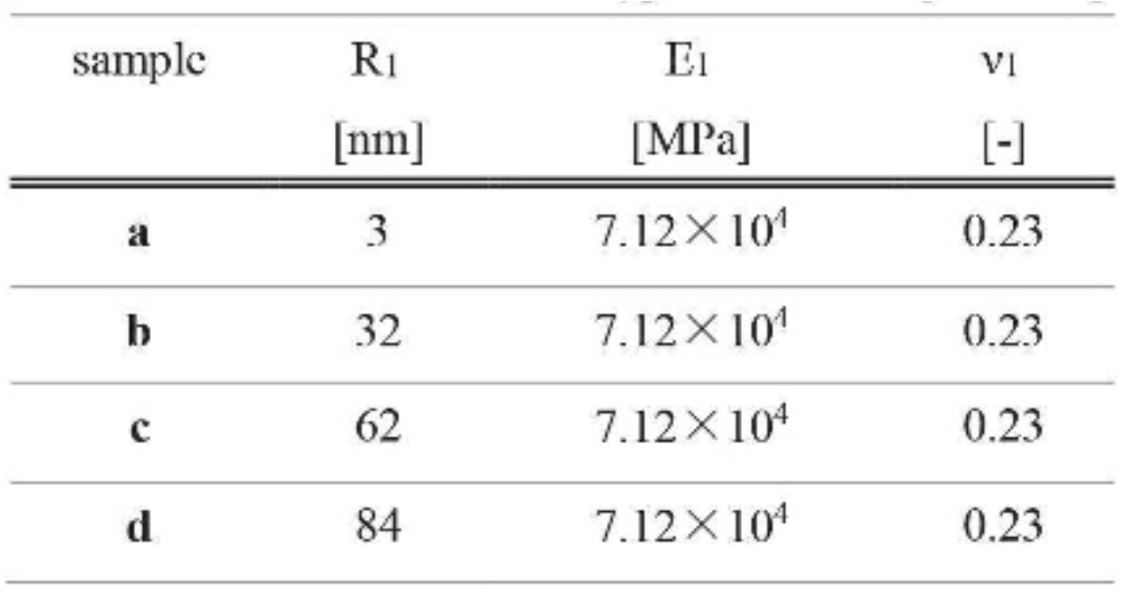 Table 1 Parameters of various types of textured glass sample.
Table 1 Parameters of various types of textured glass sample.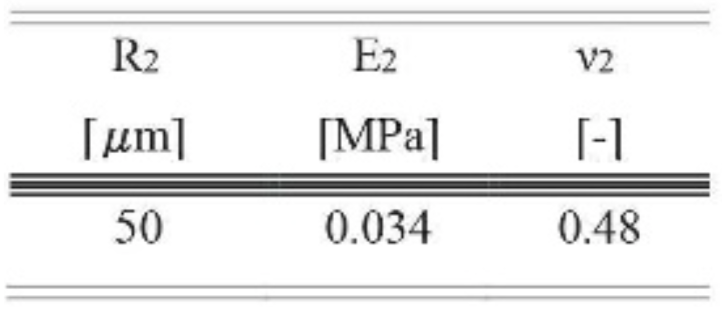 Table 2 Parameters of finger skin.
Table 2 Parameters of finger skin.3.3.2 指滑り性データの取得
2.3.1に記載した方法にて被験者133名の実指μデータを取得した。Fig.17に示すように指でナノ構造ガラス表面を掃引した際の法線方向力をFg、接線方向力をFh、とする。
巨視的視点では指とナノ構造ガラス間は多点で接触していると推定される。一方、微視的視点においては、ガラス表面の凹凸部1つと指紋が1対1で接触していると推測される。本実験で取得した各データは多点接触で得られたものであり、微視的な考察をするためにFig.18に示す要領で指紋とガラス凸部が接触した時に生ずる値に変換した。即ち、指と凹凸ガラス表面が多点で接触する面積を1cm2に固定し、形状因子Rzを直径とする球体の上面投影面積を凹凸部の面積と定義し、前記1cm2内の球体数を算出する。次に法線方向力、及び接線方向力、摩擦係数を球体数で除して凹凸部1つと指紋間で作用する力とした。
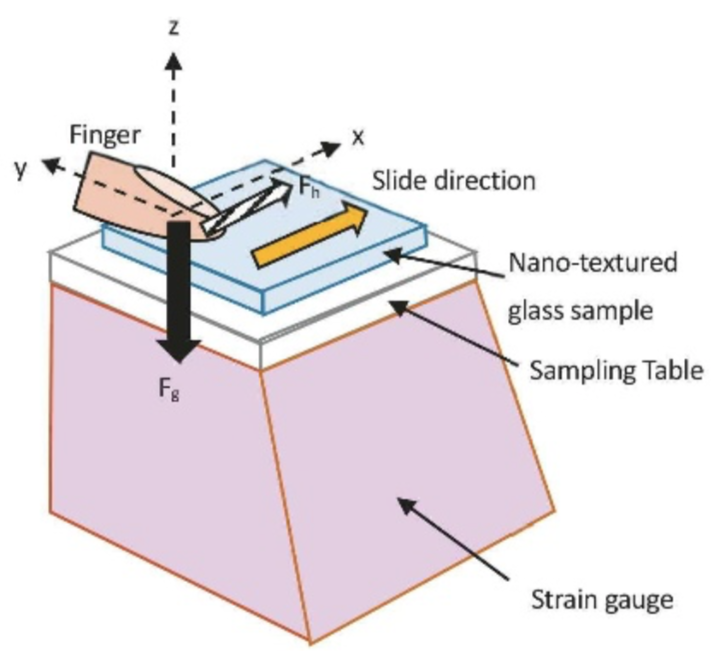 Fig.17 Image of real finger μ measurement.
Fig.17 Image of real finger μ measurement.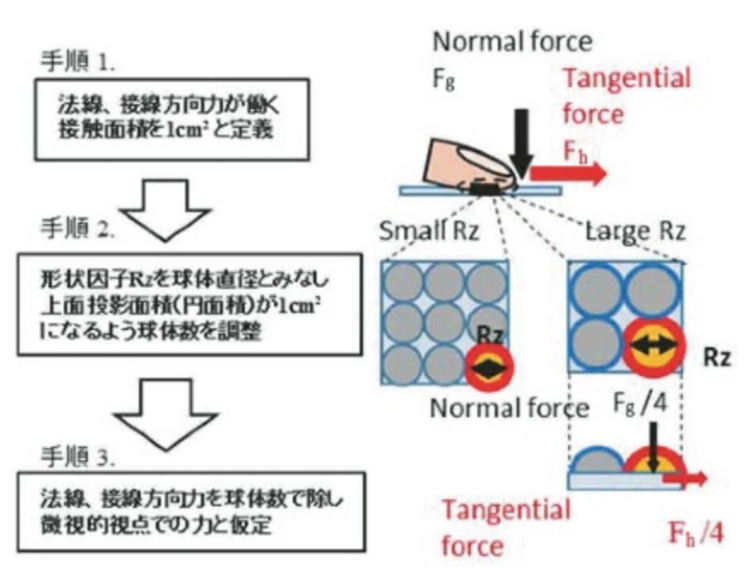 Fig.18 Standardization of measurement data.
Fig.18 Standardization of measurement data.3.4. 評価結果及び考察
測定によって得られた法線方向力、接線方向力、及びTable 1,2に示したパラメーターを式(4)へ代入して試料別に解析した結果をFig.19に示す。縦軸は実指μの逆数、横軸は式(4)で解析した相対変位δhである。いずれの軸も滑り性を表し数値が大きいと滑り性が良い事を示している。前述の通り、同じ試料でも、被験者により滑り性の感度が大きく異なる。Table 1にも示しているが、a)からd)の順で試料のラフネスが大きくなる。即ちRzが大きくなるに従い、実指μデータの逆数も大きくなる傾向にある。また、式(4)で導出した相対変位δhについては試料のラフネスが大きくなるに従って、プロット範囲が大きい方にシフトしていることがわかる。
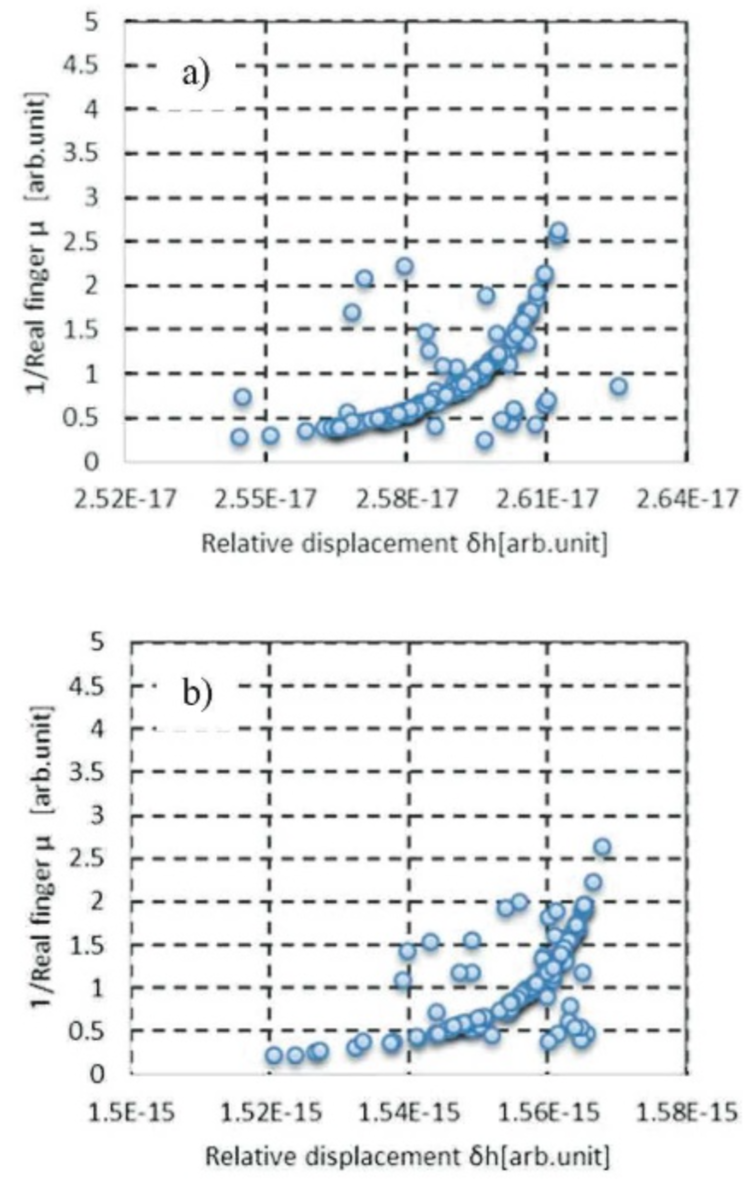
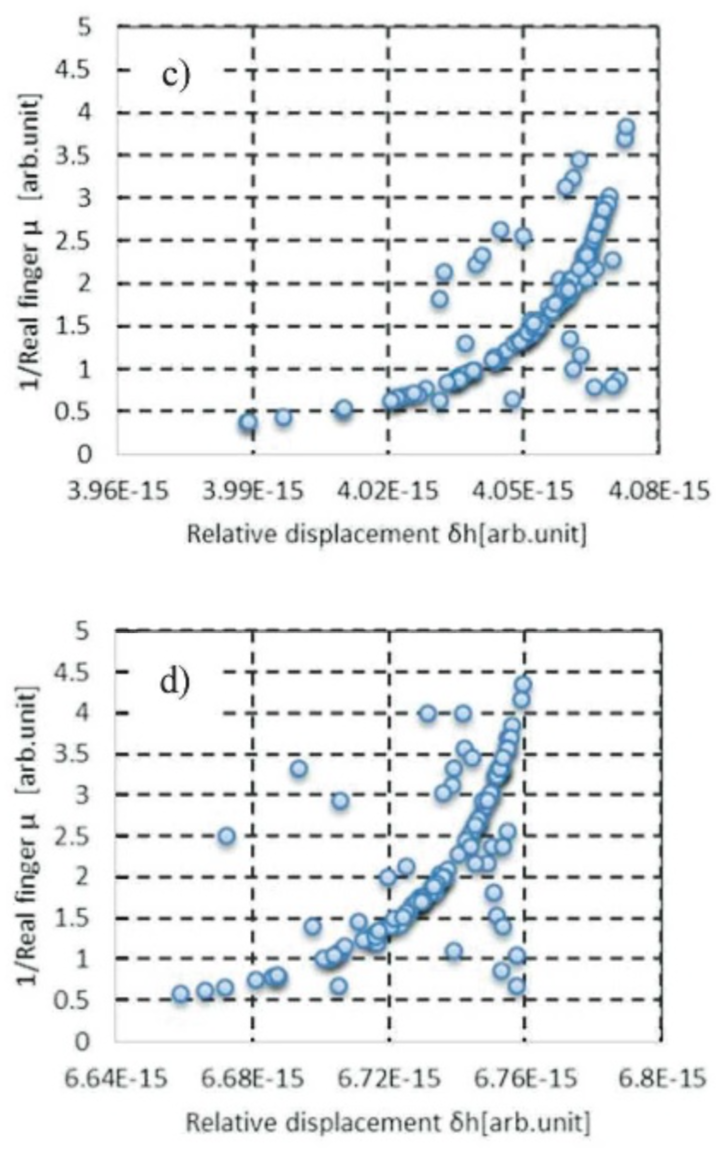 Fig.19 Results of experimental and generated value in various samples.
Fig.19 Results of experimental and generated value in various samples.任意被験者における試料ごとの摩擦係数の逆数と相対変位の関係をFig.20に示す。試料のラフネス=Rzの増大にともない実測の滑り性が良化する傾向が、形状効果を反映したHertz接触モデルにより再現できることが確かめられた。
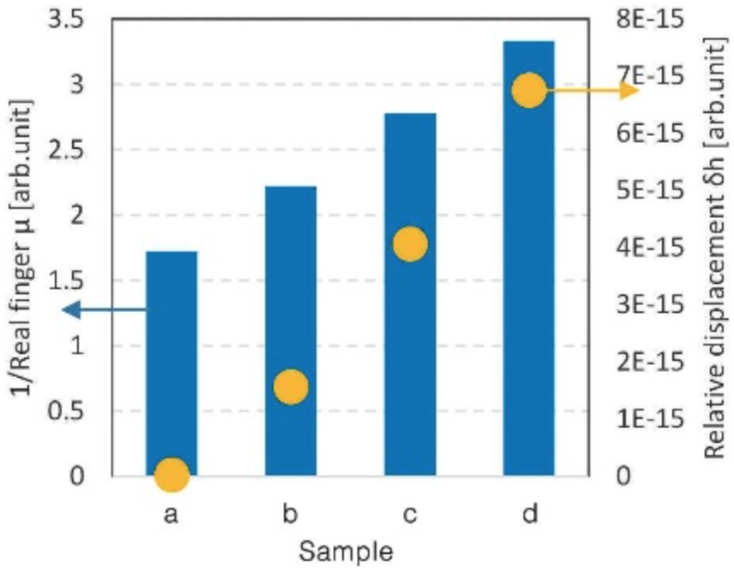 Fig.20 Result of experimental and generated value by arbitrary subject.
Fig.20 Result of experimental and generated value by arbitrary subject.同じ試料でも実指μに差が生じるのは、第2章で考察した指の柔らかさに起因する摩擦の違いによるものと考えられる。Fig.21は2.4にて述べたCutometerで測定した被験者の皮膚摩擦(回転摩擦)と水分量の関係を示しており、両者の間には一定の相関が見られる。皮膚摩擦は一定速度で回転するテフロン製プローブ表面に指が接触した時に加わるトルクを規格化したものであり、水分量が多い被験者では皮膚とプローブの追従性が良く接触面積が増加することにより皮膚摩擦が増大するものと推察される。Fig.22は試料aにおける実指μと皮膚摩擦の相関関係を表したグラフである。皮膚摩擦が大きい被験者の実指μの逆数(1/Real finger μ)は相対的に小さい傾向が確認され、指先の粘弾性が実指μに影響を及ぼすことが示唆される。
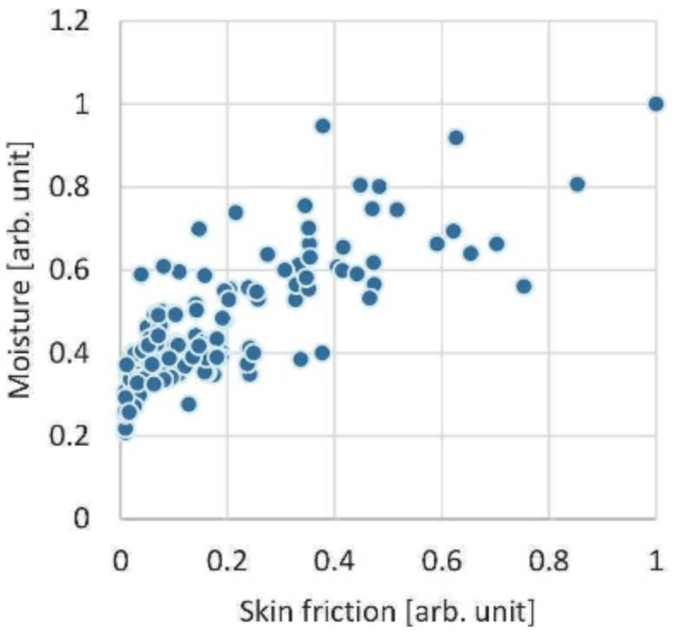 Fig.21 Correlation of Moisture and Skin friction.
Fig.21 Correlation of Moisture and Skin friction.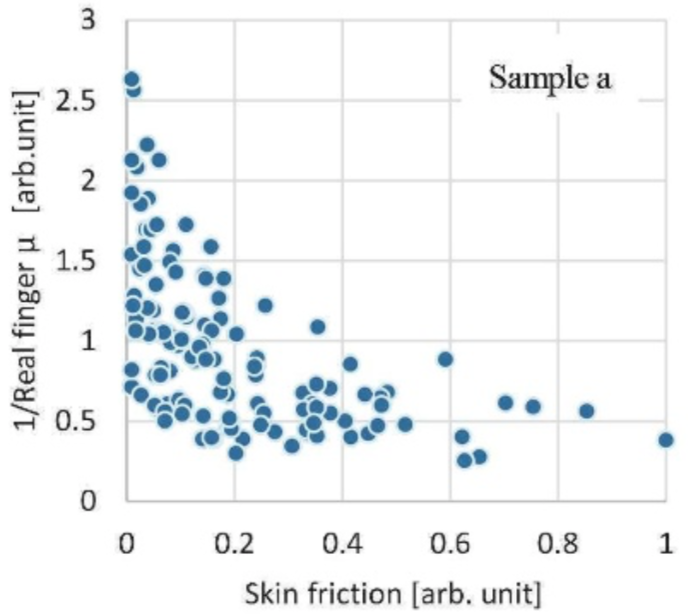 Fig.22 Correlation of real finger μ and skin friction.
Fig.22 Correlation of real finger μ and skin friction.3.5. まとめ
ナノ構造ガラスの表面と指の微視的接触について、Hertz接触モデルにより指滑り性の数値の算出を試み、実指μとの対比を行った。凹凸表面形状と指紋の接触を球対球の接触モデルで模擬し、得られた相対変位と実指μに相関関係が示唆された。また凹凸形状を制御することで指滑り性を任意にコントロール出来るとともに、定性的な触感を定量的に取り扱えることがわかった。
4. 結言
本稿では、ガラスの透明感や光沢感を保ったまま触り心地を制御したガラスの開発の中で取り組んできた、触感の定量評価検討について報告した。
実指μという指標により指滑り性を人間の感覚と相関のある形で数値化することに成功した。さらに微細構造を有するガラスのHertz接触モデルから算出した指滑り性の計算値と、実指μの測定値に相関があることを確認した。
ここで紹介したナノ構造ガラスでは触感の支配因子は指滑り性であるが、当然ながら嗜好性も重要な要素である。100人以上に対して実指μ測定とアンケートによる嗜好性調査を実施した結果、嗜好性と指滑り性は必ずしも一致しないことがわかっている。70%程度の人が良く滑るものを一番好きと回答したが、ある程度ひっかかるサンプルを好む人が30%程度存在した。
嗜好性についてはまだ定量化する手法がなく、官能評価に頼らざるを得ない状況である。嗜好性も商品化を検討する上では非常に重要なパラメーターになりうるため、今後は嗜好性の定量化や実指μと嗜好性の関係の調査が新たな課題となるだろう。
参考文献
- 木崎健太郎, 触感をデザインする,日経ものづくり, 10月号, p.46 (2016).
- (a) S. Bensmaia, M, Hollins, Pacinian representations of fine surface texture, Perception & Psychophysics 67, 842 (2005), (b) W. M. Bergmann Tiest, A. M. L. Kappers, Cues for haptic perception of compliance, IEEE Transactions on Haptics 2, 189 (2009), (c) H. Shirado, T. Maeno, Modeling of Human Texture Perception for Tactile Displays and Sensors, Proceedings of IEEE World Haptics Conference, 629 (2005).
- 前野隆司 他, ヒト指紋形状の力学的意味, 日本機械学会論文集C , 71巻, 701号, p.245 (2005).
- “触り心地の制御、評価技術と新材料・新製品開発への応用”, p.159 (2017), 技術情報協会, 東京.
- 川副智行 他, 毛髪のトライボロジーと触感認識に関する研究の現状, 日本トライボロジー学会トライボロジー会議予稿集, 2007-9巻, p.491 (2007).
- 大原浩樹 他, コラーゲンペプチド経口摂取による皮膚角層水分量の改善効果, 日本食品科学工学会誌, 56巻, 3号, p.137 (2009).
- 田中由浩, 佐野明人, 触知覚メカニズムと指・皮膚構造, バイオメカニズム学会誌, 38巻, 1号, p.47 (2014).
- 前野隆司 他, ヒト指腹部構造と触覚受容器位置の力学的関係, 日本機械学会論文集C, 63巻, 607号, p.881 (1997).
- H. Hertzs, Über die Berührung fester elastischer Körper, J. Reine Angew. Math. 92, 156 (1881); Translated and reprinted in English in “Hertz’s Miscellaneous Papers” (Macmillan & Co, London, 1896) Ch. 5.
- R. D. Mindlin, Compliance of elastic bodies in contact, J. Applied Mech., 16, 259 (1949).
- 日本トライボロジー学会(編), “トライボロジーハンドブック”, 養賢堂 (2001).
- 池田篤俊 他, 初期滑り時の接触面偏心度に基づく弾性体の把持力制御, 日本ロボット学会誌, 23巻, 3号, p.337 (2005).
- 池田義明, 藤田欣也, 指先の接触面積と反力の同時制御による柔軟弾性物体の提示, 日本バーチャルリアリティ学会論文誌, 9巻, 2号, p.187 (2004).